Nach langer Zeit habe ich es heute endlich geschafft, dass Problem mit dem Mendel 90 in Griff zu bekommen. Existent war dieses eigentlich schon seit Anbeginn des Druckerbaus. Anfänglich dachte ich noch das dieser Fehler leicht zu beheben wäre, allerdings war dieses schon ein ganz schön harter Brocken, der mich auch immer wieder an die Grenze der Motivation brachte.
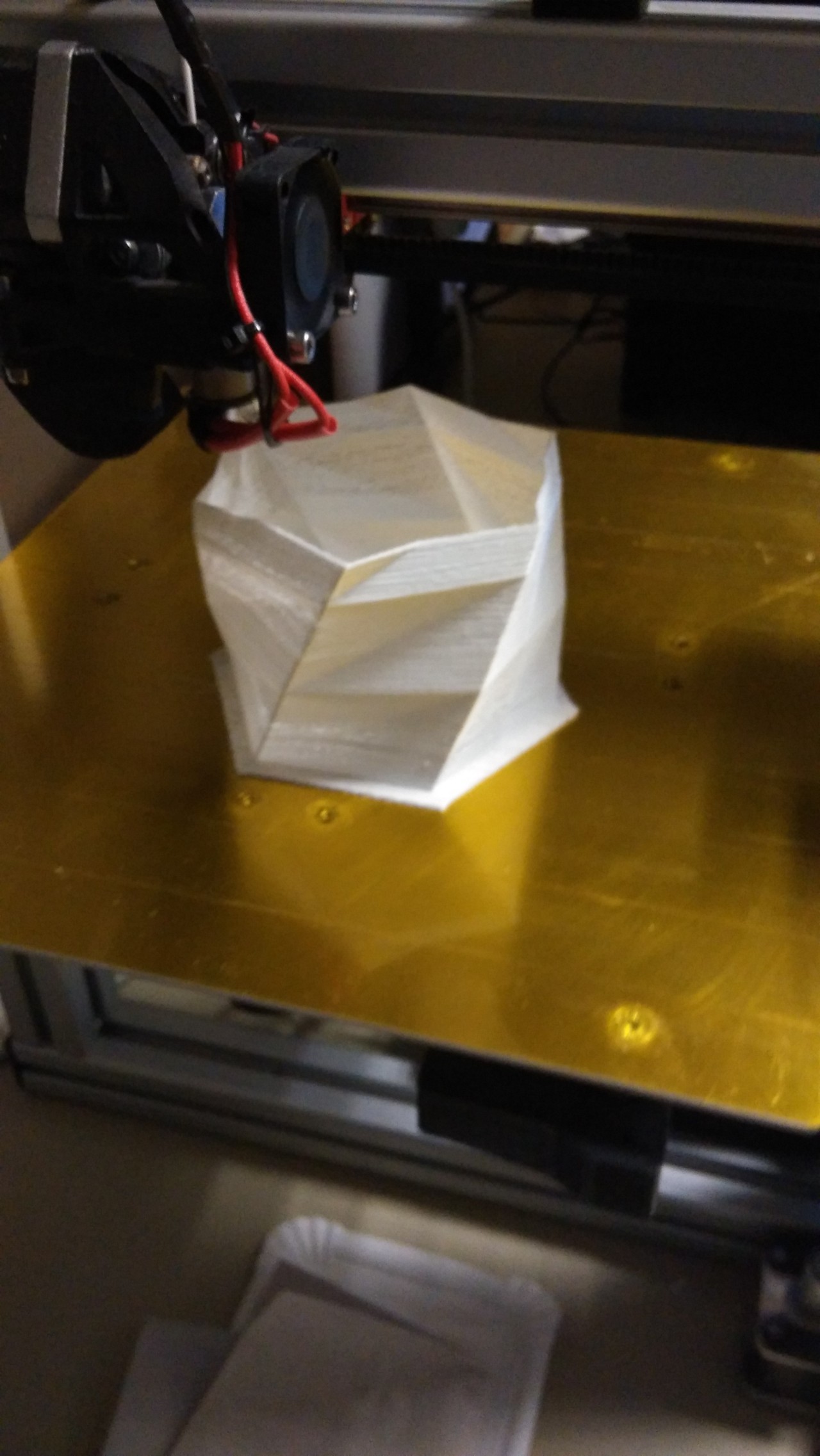
Problem war, dass der Drucker im produktiven Betrieb im Verlauf der entgegen gesetzten X-Achsen Bewegung immer wieder bei der Hälfte anhielt und seine Position verlor. Dadurch verschoben sich die Layer immer um ca. die Hälfte des zu druckenden Objektes. Im Debugging Modus der Firmware war dieses Problem nicht vorhanden. Anfänglich ging ich noch von einen Fehler im ATX Netzteil aus. Sollte man nicht den 5V Anschluss mit nutzen, kann es vorkommen das dieses unsauber arbeitet.
Das der Fehler nur auftrat wenn sowohl Extruder als auch Heizbett aktiv war, war schon sehr verwunderlich. Ein Tausch des Netzteil brachte jedenfalls keine Lösung auch nicht das Wechseln der Pololus. Das es im Prozess der Leistungsaufnahme sein musste war mir durch Gegenprüfung im Debugging schon irgendwie klar. Allerdings brachte mich erst der Tip eines RepRap Forenbenutzers auf die Idee einen eventuellen „crosstalk“ zu berücksichtigen.
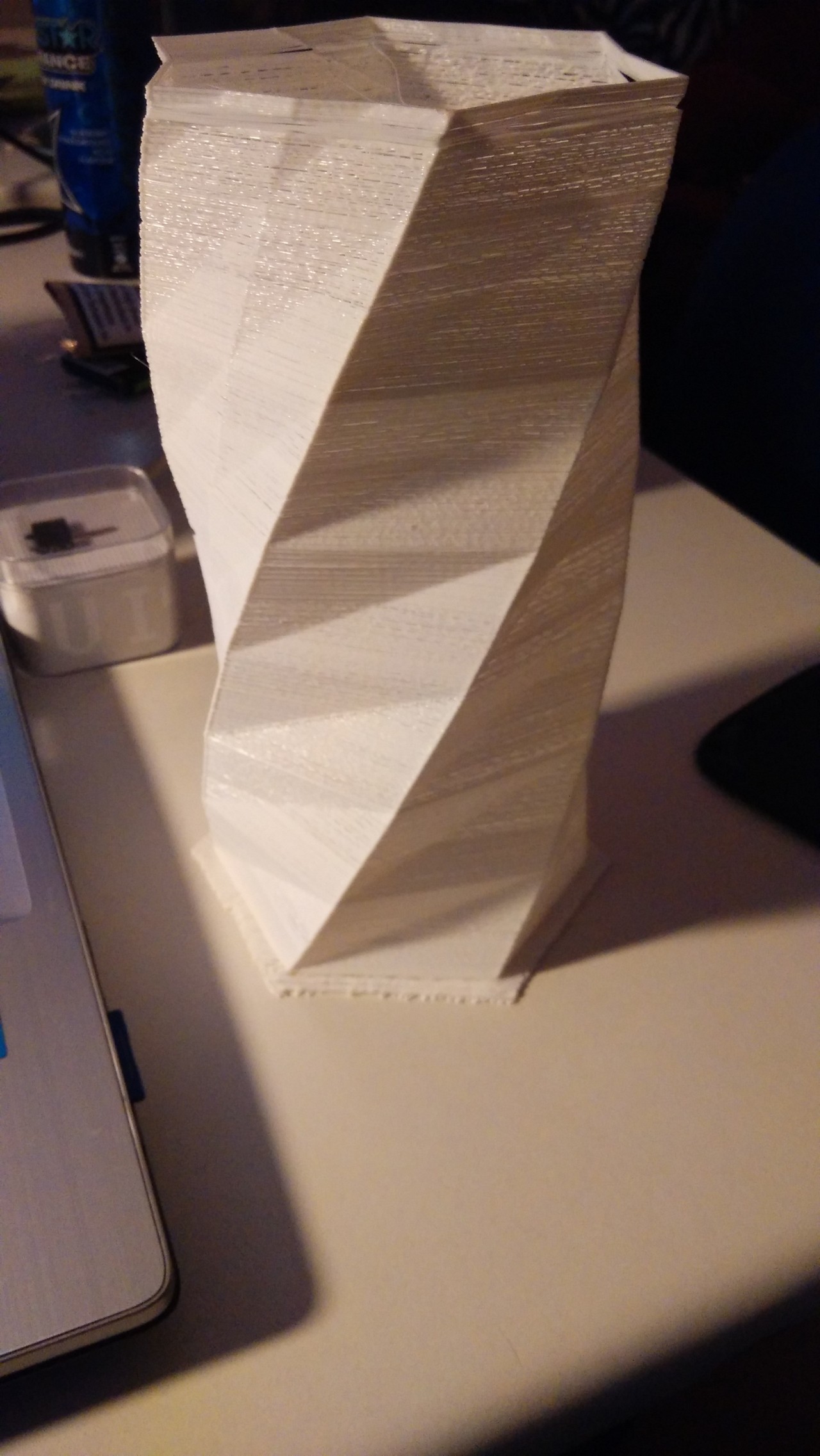
So war es dann letztendlich auch. Ob nun das RAMPS 1.4 Board innerhalb des Designs Fehler zu den Endswitsches hat oder ob die Flachbandkabel-Zuleitung zum Extruder den Fehler verursacht kann ich im Detail nicht sagen. Allerdings brachte der schon erwähnte Tip des Rätsels Lösung. Durch deaktivieren der Endswitches außer im „home position only“ Modus wird jegliche Fehlkommunikation unterbunden.
Einzig kleine Änderung besteht nun darin bei der manuellen Positionierung in langsamen Schritten auf die home position zuzufahren. In den nächsten Tagen und Wochen muss ich nun allerdings noch kleine Konfigurationsparameter ermitteln, Aufnahme des Filament gestaltet sich noch nicht ganz reibungslos sowie die Feinabstimmung der Z-Achse und Extruder Position.
Aber nachdem nun der größte Teil bewältigt ist, bin ich zuversichtlich bald die restlichen Ideen für welches der Drucker geplant war anzugehen.
 Ein weiteres Projekt momentan in Bearbeitung ist ein Kinder MP3-Player für meinen Sohn.
Ein weiteres Projekt momentan in Bearbeitung ist ein Kinder MP3-Player für meinen Sohn.